UNIT 11 : Concepts and operations on linear transformations in 2D
Key unit competence
Determine whether a transformation of IR2 is linear or not. Perform operations on linear transformations.
Learning objectives

11.1 Linear transformation in 2D
Activity 11.1
What is transformation as is used in mathematics? What is linear transformation? Research on the different types of 2D linear transformations. Discuss your findings with the rest of the class.
Definitions
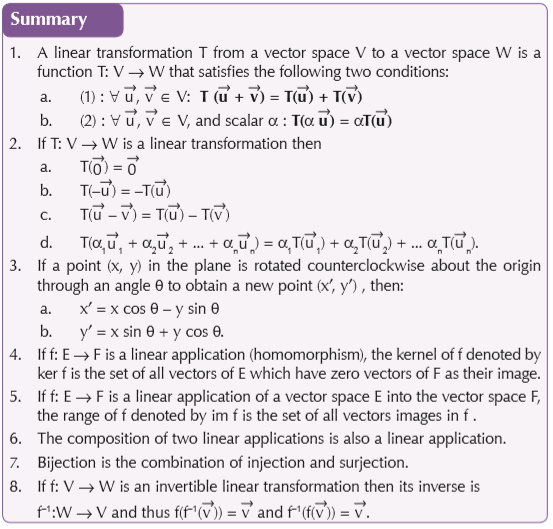
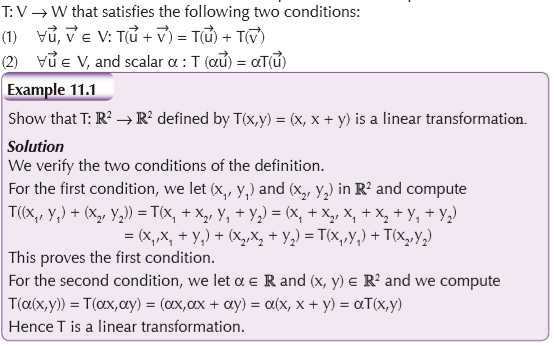
A linear transformation T from a vector space V to a vector space W is a function
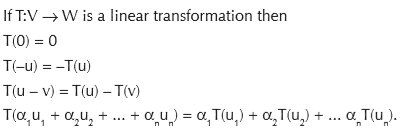
Properties of linear transformations
11.2 Geometric transformations in 2D
Activity 11.2
Research on the meaning of geometric transformations. How many types can you list, with examples? Discuss your findings in class.
A geometric transformation is an operation that modifies the position, size, shape and orientation of the geometric object with respect to its current state and position.
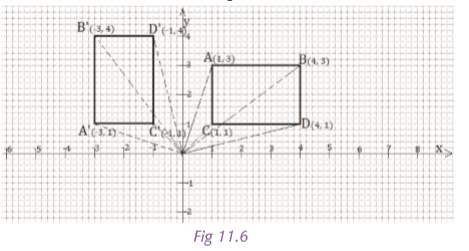
Reflection
Generally, a reflection is a transformation representing a flip of a figure. Figures may be reflected in a point, a line, or a plane. When reflecting a figure in a line or in a point, the image is congruent to the preimage.
A reflection maps every point of a figure to an image across a line of symmetry using a reflection matrix.
Use the following rule to find the reflected image across a line of symmetry using a reflection matrix.

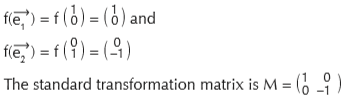
Reflection (symmetry) about x-axis
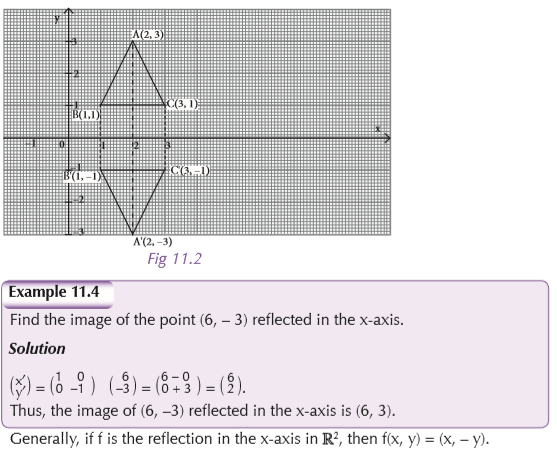
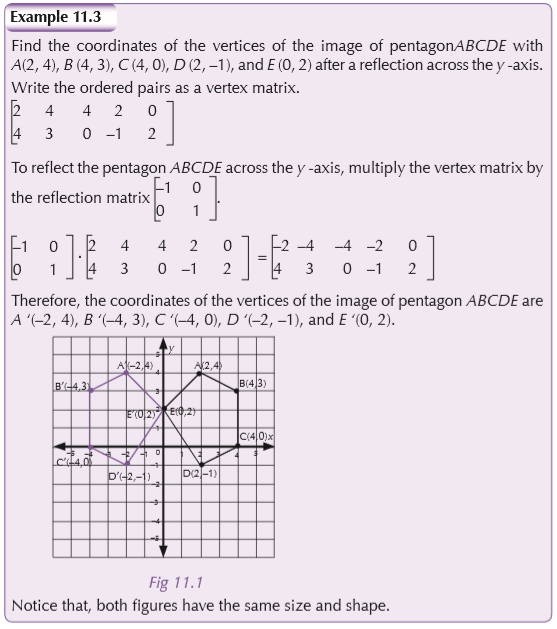
Reflection (symmetry) about y-axis
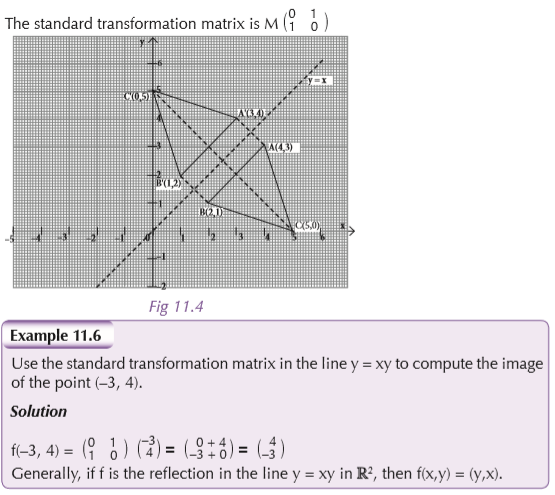
Reflection (symmetry) about the line y = x
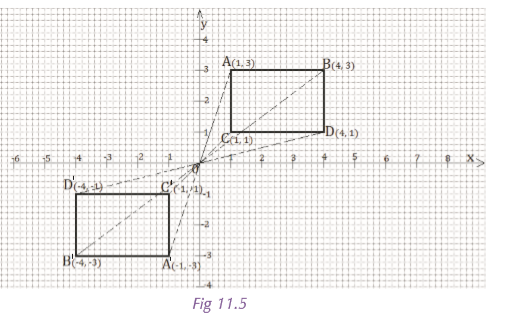
Central symmetry
Identical transformation

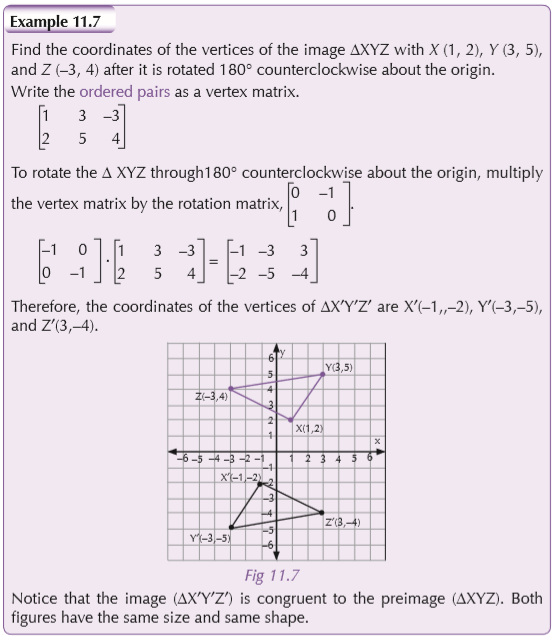
Rotation
A rotation is a transformation in a plane that turns every point of a preimage through a specified angle and direction about a fixed point. The fixed point is called the center of rotation. The amount of rotation is called the angle of rotation and it is measured in degrees.
A rotation maps every point of a preimage to an image rotated about a centre point, usually the origin, using a rotation matrix.
Use the following rules to rotate the figure for a specified rotation. To rotate
counterclockwise about the origin, multiply the vertex matrix by the given matrix.
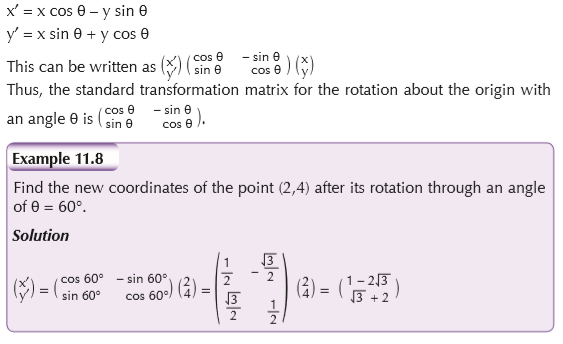
Rotation about origin with angle θ
If a point (x, y) in the plane is rotated counterclockwise about the origin through an angle θ to obtain a new point (x′, y′), then
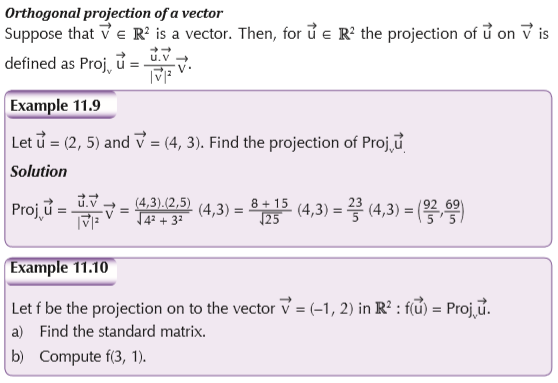
Orthogonal and orthonormal transformation
A set of vectors is said to be orthogonal if all pairs of vectors in the set are perpendicular.
A set of vectors is said to be orthonormal if it is an orthogonal set and all the vectors have unit length.
11.3 Kernel and range
Kernel and image of linear transformation
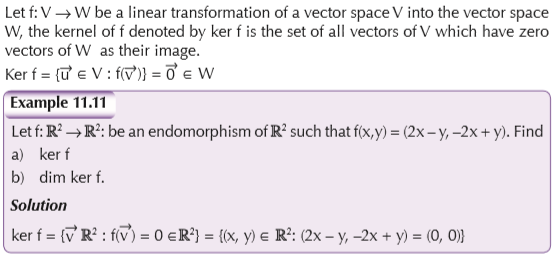
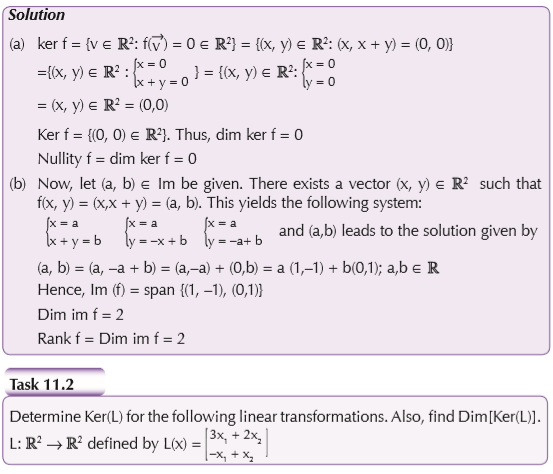
The kernel of a linear transformation

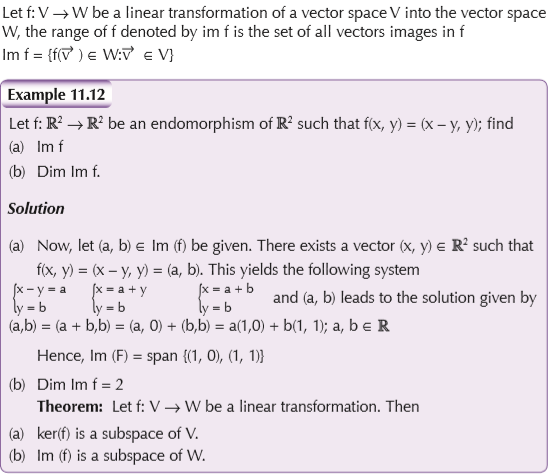
The range (image) of a linear transformation
Nullity and rank
The dimension of the kernel is called the nullity of f (denoted nullity f) and the dimension of the range of f is called the rank of f (denoted rank f).
11.4 Operations of linear transformation
Activity 11.3
In pairs, carry out research to find out what is linear transformation. How do we sum up two linear transformations and how do we compose them?
Addition
f: V → W and g: V → W
f + g = V → W: (f + g)( a ) = f( a ) + g( a ). The sum of two linear transformations is a linear transformation.
Composition of two linear transformations
Let f: V → W and g: V → W then the composite of f and g, (g f) is a linear transformation
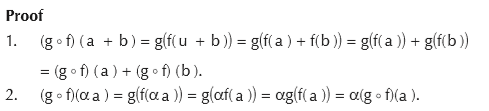
Therefore, the composition of two linear transformations is also a linear transformation.
One-to-one linear transformation
A linear transformation f is said to be a one-to one if for each element in the range there is a unique element in the domain which maps to it.
Onto linear transformation
A linear transformation f is said to be onto if for every element in the range space there exists an element in the domain that maps to it.
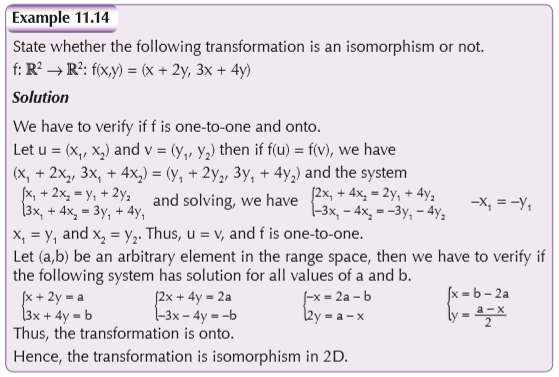
Isomorphism
The word isomorphism comes from the Greek word which means ‘equal shape’. An isomorphism is a linear transformation which is both one-to-one and onto.
If two vector spaces V and W have the same basic structures, then there is an isomorphism between them. Dim V = Dim W.
Note: A linear transformation has an inverse if and only if it is an isomorphism.
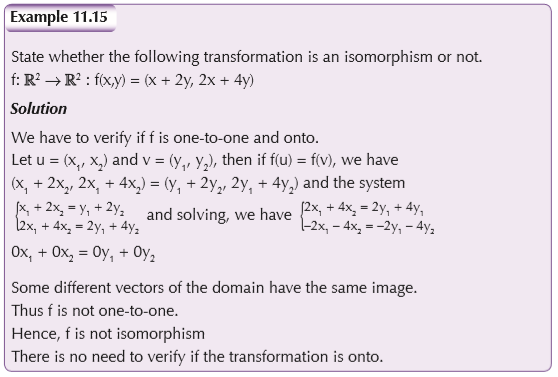
Note: A transformation fails to be isomorphism if it fails to be either one-to-one or onto.
Remark: For the linear application f: V → W when
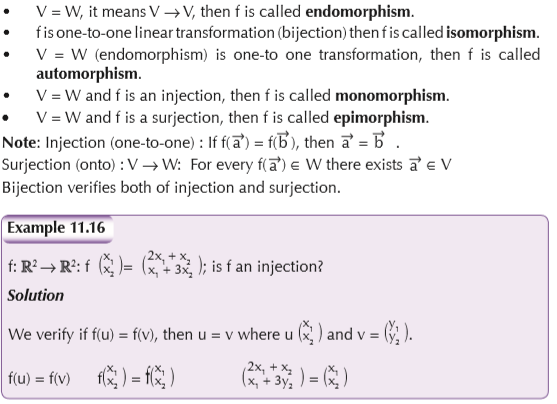

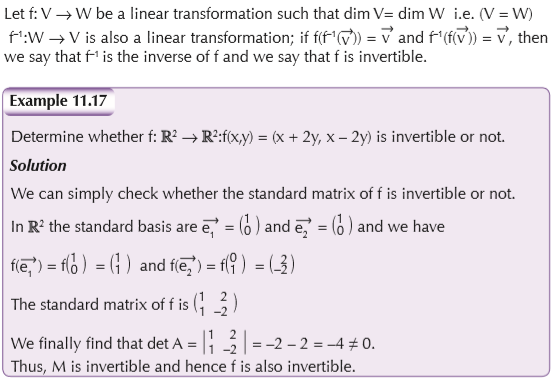
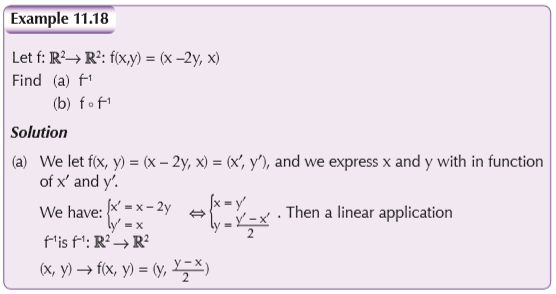
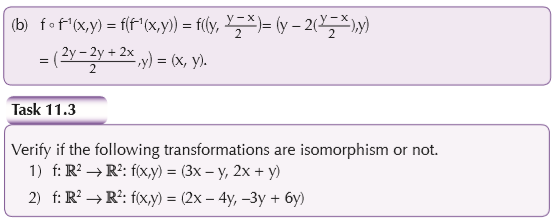
Inverse of linear transformation